
Soft Robotics to Broaded the STEM Pipeline
PIs: Nathan Mentzer (Purdue University), Rebecca Kramer (Purdue University) and Barry Burke/Anita Deck (ITEEA’s STEM Center for Teaching and Learning)
Graduate Students: Andrew Jackson (Purdue University) and Jiawei Zhang (Purdue University)
About the Project
Soft Robotics to Broaden the STEM Pipeline is an NSF-funded project out of Purdue University that seeks to broaden the STEM pipeline through the implementation of soft robot design experiences, which improves engineering motivation and self-efficacy as compared to traditional robot design experiences. In the second year of the three-year grant, the Soft Robotics project seeks to develop a promising method of teaching Science, particularly the Next Generation Science High School Engineering and Technology Standard (NGSS) 1: Engineering Design. The proposed intervention is a replacement instructional unit on soft robotics that is exchanged for an existing unit of instruction on hard robotics in the Foundations of Technology course. The intervention is designed to maintain learning outcomes while increasing student motivation and engagement, particularly in females, in engineering design and STEM disciplines overall.
Soft Robotics and Engineering byDesign™ Curriculum
Soft Robotics design experiences can be found in two Engineering byDesign™ courses—Foundations of Technology and Advanced Technological Design. Foundations of Technology, a ninth-grade course, includes the instructional unit described above. A more advanced robotics unit is found in Advanced Technological Applications (Grades 11-12). In this course, students build upon their introductory knowledge of soft robotics gained in Foundations of Technology to design, fabricate, and test a pneumatically actuated gripper.
To access Foundations of Technology and Advanced Technological Applications courses, visit your state page for instructions for on how to access the Engineering byDesign™ curriculum.
Motivation and Hypothesis
Traditional robotics typically falls between mechanical engineering (actuators and controls), electrical engineering (sensors, electronics, and cyber-physical systems), and computer science (programming). Female participation in these disciplines has historically been low. According to a 2011 profile of engineering statistics conducted by the American Society for Engineering Education (Yoder, 2012), engineering disciplines with low percentage of bachelor degrees awarded to women are:
- computer engineering (9.4%),
- computer science (10.9% outside engineering, 11.2% inside engineering),
- electrical engineering (11.5%), and
- mechanical engineering (11.7%).
On the other hand, the engineering disciplines with high female representation include:
- environmental engineering (44.3%),
- biomedical engineering (39.1%),
- biological & agricultural engineering (31.9%),
- chemical engineering (33.1%),
- industrial/manufacturing engineering (29.1%), and
- metallurgical & materials engineering (28.4%).
In contrast to traditional robotics, the fundamental principles of soft robotics tend towards materials science (understanding how materials stretch and deform), chemistry (polymer synthesis), and biology (bio-inspired design). By shifting the building blocks towards disciplines that females are more naturally drawn to, we hypothesize an increase in female participation in the technical aspects of soft robotics (as compared to traditional robotics) and a corresponding increase in their self-confidence related to engineering and design.
The hypothesis guiding this research proposal is that the implementation of soft robot design experiences improves engineering motivation and self-efficacy as compared to traditional robot design experiences.
Mold Design
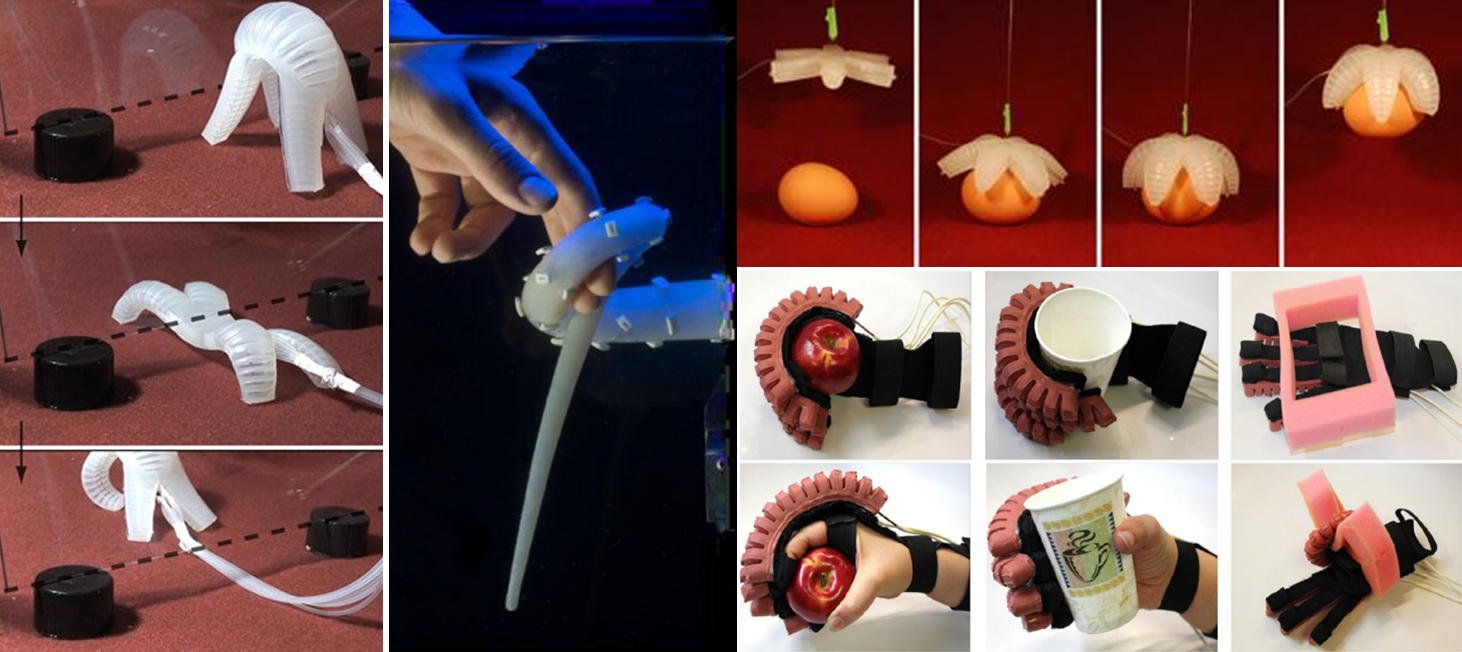
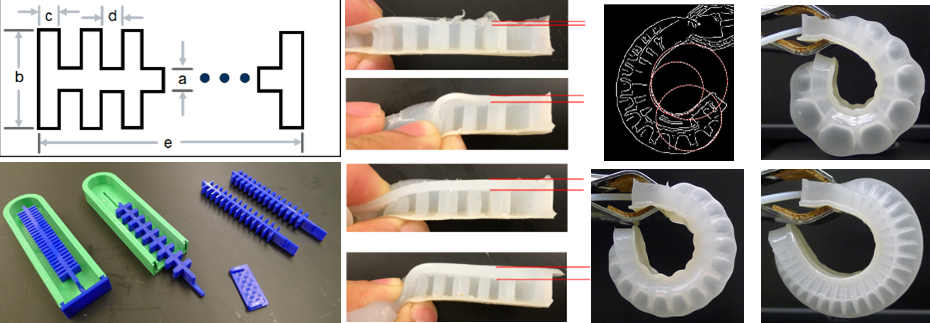
 We have chosen to focus our study on a soft robotic gripper activity that can be compared against a traditional rigid pick-and-place robotic gripper activity. The general process of fabricating soft robotic grippers involves mixing a two-part silicone rubber, molding the elastomer in a 3D-printed mold, and sealing the molded part to a flexible but inextensible layer (we use rubber-fabric composite). This creates air channels embedded within the gripper.
We have chosen to focus our study on a soft robotic gripper activity that can be compared against a traditional rigid pick-and-place robotic gripper activity. The general process of fabricating soft robotic grippers involves mixing a two-part silicone rubber, molding the elastomer in a 3D-printed mold, and sealing the molded part to a flexible but inextensible layer (we use rubber-fabric composite). This creates air channels embedded within the gripper.
Tubing is inserted into the rubber device to access an embedded air channel. By pushing air into the tubing via a pump or squeeze bulb, air will pressurize the embedded channel and the inflation will cause motion. The mold design has been optimized to allow for maximum design flexibility while preventing critical failure modes.
Pilot Activity
We piloted our soft robotic gripper activity through Purdue’s Innovation to Reality (I2R) Event with 6th-8th grade students. Outcomes of the pilot include refinements to the mold and pedagogical approach and 35 engaged students as shown below.

Publications and Presentations
Below is a list of research papers, peer-reviewed articles, and presentations about the Soft Robotics project.
Publications
Jackson, A., Mentzer, N, Zhang, J., & Kramer, R. (Manuscript in Progress). Pilot Analysis of Impacts of Soft Robotics in High School. Target Journal: International Journal of Design and Technology Education.
Zhang, J., Jackson, A., Kramer, R., & Mentzer, N. (2017). A Modular, Reconfigurable Mold for a Soft Robotic Gripper Design Activity. Frontiers in Robotics and AI: Soft Robotics 4(46).
Jackson, A., Mentzer, N. (Under Review). Intersecting Self-efficacy and Interest. Paper presented at the 2018 ASEE Annual Conference & Exposition, Salt Lake City, UT.
Jackson, A., Mentzer, N. (Accepted). Making meaning of design failure. Paper presented at the 78th Annual International Technology and Engineering Educators Association CTETE, Atlanta, GA.
Jackson, A., Mentzer, N., Kramer, R., & Zhang, J. (2017). Enhancing Student Motivation and Efficacy through Soft Robot Design. Paper presented at the 2017 ASEE Annual Conference & Exposition, Columbus, OH.
Jackson, A., Mentzer, N., Kramer, R., & Zhang, J. (Under Review). Soft Robotics to Broaden the STEM Pipeline. Paper presented at the 78th Annual International Technology and Engineering Educators Association CTETE, Atlanta, GA.
Jackson, A., Zhang, J., Kramer, R., & Mentzer, N. (2017). Design-based Research and Soft Robotics to Broaden the STEM Pipeline (Work in Progress). Paper presented at the 2017 ASEE Annual Conference & Exposition, Columbus, OH.
Jackson, A., Zhang, J., Kramer, R., & Mentzer, N. (2017). MAKER: Taking Soft Robotics from the Laboratory to the Classroom. Paper presented at the 2017 ASEE Annual Conference & Exposition, Columbus, OH.
Jackson, A., Mentzer, N., Kramer, R., & Zhang, J. (Under Review). Soft robotics in the classroom. Presentation at the 78th Annual International Technology and Engineering Educators Association, Atlanta, GA.
Mentzer, N., & Jackson, A. (Under Review). Soft robotics to broaden the STEM pipeline. Presentation at the Council on Technology and Engineering Teacher Education/International Technology and Engineering Educators Association 2018 Annual Conference, Atlanta, GA.
Mentzer, N., Jackson, A., Kramer, R., & Zhang, J. (Accepted). Pilot Results: Increasing STEM Self-efficacy and Motivation through Soft Robotics Design. Poster Presented at the International Technology and Engineering Educators Association STEM Showcase, Atlanta, GA.
Jackson, A., Mentzer, N., Kramer, R., & Zhang, J. (2017). Increasing STEM Self-efficacy and Motivation through Soft Robotics Design. Poster Presented at the International Technology and Engineering Educators Association STEM Showcase, Dallas, TX.
Jackson, A., Mentzer, N., Kramer, R., & Zhang, J. (2017). Increasing STEM Self-efficacy and Motivation through Soft Robotics Design. Workshop presented at the 2nd Annual Indiana STEM Education Conference, West Lafayette, IN.
Jackson, A., Mentzer, N., Kramer, R., & Zhang, J. (2017). Soft Robotics Grant Project. Presented at the NSF ITEST PI Conference, Washington: DC.
Mentzer, N., Jackson, A., Kramer, R., & Zhang, J. (2017). Soft Robotics for Teachers. Presented at the Purdue University STEM Teacher Professional Development Workshop, West Lafayette, IN.
Jackson, A. & Mentzer, N. (2016). Graduate student forum: Increasing STEM Self-efficacy and Motivation through Soft Robotics Design. Presentation at the Council on Technology and Engineering Teacher Education/International Technology and Engineering Educators Association 2016 Annual Conference, Washington, DC.
Jackson, A., Mentzer, N., Kramer, R., & Zhang, J. (2016). Increasing STEM Self-efficacy and Motivation through Soft Robotics Design. Presentation at the 13th Annual ASEE Workshop on K-12 Engineering Education, New Orleans, LA.
Mentzer, N. (2016). Integrative STEM in context: Soft Robotics Research in EbD’s Foundations of Technology. Presented in the Administrators Strand at the 76th Annual International Technology and Engineering Education Association Annual Conference, Washington: DC.
Mentzer, N. & Huffman, T. (2016). Soft Robotics Grant Project. Presented at the NSF ITEST PI conference, Washington: DC.
Presentations
Jackson, A., & Mentzer, N. (2018, April). Soft robotics in the classroom. Presentation at the International Technology and Engineering Educators Association 2018 Annual Conference, Atlanta, GA.
Mentzer, N., Jackson, A., Kramer, R., & Zhang, J. (2018, April). Pilot results: Increasing STEM self-efficacy and motivation through soft robotics design. Poster presented at the International Technology and Engineering Educators Association STEM Showcase, Atlanta, GA.
Mentzer, N., & Jackson, A. (2018, April). Soft robotics to broaden the STEM pipeline. Presentation at the Council on Technology and Engineering Teacher Education/International Technology and Engineering Educators Association 2018 Annual Conference, Atlanta, GA.
